LM立磨中cs区别

中材立磨交流讲解学习 - 百度文库
LM -CS立磨. a) 生产厂家为莱歇公司; b) 适用于水泥熟料粉磨; c) LM型辊式磨采用圆锥形磨辊和水平磨盘; d) 磨辊采用主辊辅辊形式,辅辊完成磨床的. g)LM 4-6辊立磨具有很好的适应性,其磨辊是单独 成对控制,当1个磨辊出故障时,可以抬起相应 组的磨辊,使用 ...莱歇公司收到两个立磨订单,一个型号为LM 60.4,用于粉磨水泥原料;另一个型号为 LM 70.4+4 CS,它是莱歇公司最大的立磨, 用于粉磨水泥熟料。 Mfamosing – 该水泥厂位于 创新设计的动力:采用 COPE 新驱动 的最大莱歇磨机 LM ...你知道立磨是如何命名具体型号 的吗?小编与你一起探讨一下。 1立磨型号大小是根据立磨转盘中径来确定 LM 是立磨拼音 limo 首字母缩写,而立式磨机 的型号大小主要是根 w w w LM立磨中cs区别

《中材立磨交流》 - 百度文库
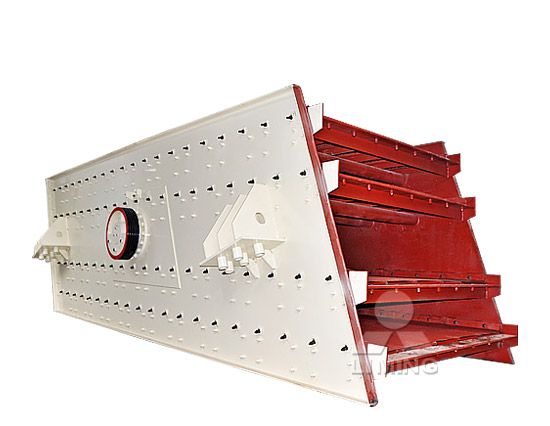
主要区别在磨辊与磨 盘的结构组合不同。 磨辊沿水平圆形轨迹在磨盘上运动,通过外部施加 在磨辊上的垂直压力,使磨盘上物料受到挤压和剪切作用,得以粉碎。LM系列立式磨粉机分为矿磨、煤磨、难磨三种类型。. 矿磨是适用于水泥业生料行业;. 煤磨可广泛应用于水泥、电力、钢铁、冶金、建材、化工等行业的煤粉制备;. 难磨适用于钢、铁厂粉磨矿渣、水渣,也适用于水泥熟料 LM系列立式磨粉机为了保证混凝土的早期强度,水泥颗粒中0-3µm颗粒应达10%左右,而保证混凝土后期强度,3—30µm的水泥颗粒则需70%以上。. 立磨同球磨机相比,水泥虽然28天强度相同,由于颗粒级配范围狭窄,3-30µm颗粒高 立磨 - 百度百科

立式磨机 - 百度百科
立磨的选型受物料性质的影响有两个方面:其一是易磨性,也就是需要多少力,消耗多少功的问题;其二是在粉磨过程中物料对设备造成多大的磨损。 由于各种立磨有不同的形式, LM立磨中cs区别 中材在吸收国内外先进技术的基础上,自主开发的用于粉磨矿渣的系列立式辊磨机,解决了稳定料床防止振动,磨内除铁磨辊和磨盘的磨损,高效选粉等关键技术 LM立磨中cs区别-砂石矿山机械网2022年3月10日 雷蒙磨与立磨的区别. 雷蒙磨与立磨,单从外观上看似乎差不多,但实际上,它们从内部结构到磨粉细度,再到适用范围都有着一定的差距的,今天就让我们来详细了解一下吧:. 1.内部结构. 雷蒙磨内部的 雷蒙磨与立磨的区别 - 知乎专栏

关于Daphile/LMS五花八门的玩法,总结经验,如何玩好看 ...
2022年8月18日 4、Daphile。Daphile非常适合对linux刚开始不熟悉的烧友玩,对LMS使用方面做了一些优化,配置、挂载NAS都设计了专门的配置界面,基本上不需要使用linux 指令窗口就能完成配置。如果用专门独立的X86主机,达菲作为日常使用主力网播平台使用也没有 2019年6月22日 第二种解决方案是在LMS算法的权值更新的参考信号路径中放置一个相同的滤波器,从而实现了所谓的F-xLMS(FXLMS)算法。的逆并不一定存在,FXLMS算法通常是最有效的方法。的影响,Morgan [1]提 FxLMS算法 - CSDN博客2020年10月3日 文章浏览阅读2.2w次,点赞30次,收藏163次。本文介绍了mimo技术在无线通信和光通信中的应用,及其在接收端进行信号分离和恢复的均衡算法,包括盲均衡算法和基于训练序列的均衡算法——最小均方 MIMO均衡算法(CMA,LMS,RLS)原理介绍 - CSDN博客

最陡梯度下降算法和LMS算法原理介绍及MATLAB实现
文章浏览阅读4k次,点赞16次,收藏62次。维纳滤波介绍这两种算法之前先来简答介绍下维纳滤波的问题x(n)x\left( n \right)x(n)和y(n)y\left( n \right)y(n)是零均值的平稳离散信号,并且已知它们的二阶矩,采用最小均方误差准则(MMSE, Minimum Mean-Squared Error)可以设计最优线性滤波器。2017年6月18日 # 概念 LMS(least mean square):(最小均方法)通过最小化均方误差来求最佳参数的方法。 GD(gradient descent) : (梯度下降法)一种参数更新法则。可以作为LMS的参数更新方法之一。 The normal equations : (正则方程式,将在下一篇随笔中机器学习笔记 1 LMS和梯度下降(批梯度下降) 20170617 ...如题,LMS和MMSE的区别是什么呢?LMS是least mean square,在滤波器中是要求误差的均方值最小,MMSE是minLMS和MMSE的区别是什么呢? - 知乎

RLS算法和LMS算法的区别 - CSDN文库
2023年9月19日 文章浏览阅读442次。rls算法和lms算法都是用于自适应滤波的算法,但它们有以下不同点: 1. rls算法是一种递归最小二乘算法,而lms算法是一种递归最小均方误差算法。 2. rls算法对于滤波器系数的更新是基于整个信号序列其“归一化”版本,即归一化最小均方(nlms)[5],由于进行了输入归一化,对输入相关性的敏感度较低。尽管已经有几次尝试解释nlms何时以及为什么比lms表现更好[1],[3],[6]– [18],但并没有提供精确的数学理论依据。我们通过利用事实,即两种算法(即lms和nlms)的均方性能由输入矩阵矩阵描述 ...自适应滤波:LMS/NLMS_nlms什么情况下比lms好-CSDN博客A7m4 RAW的三..我都直接压缩raw或者最小的无压缩很多需求,只要是个raw就能满足了 很少有那么极端的情况:非得无压缩raw才行 稍微压缩就不行。 索家的文件大小真的太大了 绷不住A7m4 RAW的三挡压缩模式 L M S怎么选 - 百度贴吧

深度学习之线性神经网络(LMS)(二) - 知乎专栏
线性神经网络与我在上一节提到的感知器主要区别在于,感知器的传输函数只能输出两种可能的值,而线性神经网络的输出可以取任意值,其传输函数是线性函数(purelin)。线性神经网络采用Widrow-Hoff学习规则,即LMSlms 算法(最小均方算法) 滤波器——改变信号频谱. 模拟滤波器: 由r、l、c构成的模拟电路。 数字滤波器: 由数字加法器、乘法器、延时器构成,基于数字信号运算实现。 自适应滤波器: 一种能够根据输入信号自动调整 自适应滤波方法——LMS算法 - 知乎2023年12月24日 采样器负责执行去噪步. 采样只是 Stable Diffusion 模型中的一部分。如果想理解完整的 Stable DIffusion,推荐阅读 How does Stable Diffusion work?. 下面是一个采样过程的动态展示,采样器逐渐地产生越来 全面理解Stable Diffusion采样器 - 知乎

基于LMS算法的DFE判决反馈均衡器 - CSDN博客
2021年5月12日 基于LMS算法的DFE判决反馈均衡器 DFE原理 DFE(decision feedback equalization )判决反馈均衡器。它是一种非线性均衡器,由前馈滤波器和反馈滤波器组成,前馈部分可以消在时间上超前的码间干扰(后面符号对当前码元的前导干扰)和时间上滞后的码间干扰(前面符号对当前码元产生的拖尾干扰),反馈 ...文章浏览阅读4.2k次,点赞2次,收藏15次。Q:是否有朋友能对LS,MMSE,LMMSE,ML,MAP,LMS,AR,MSE误差等算法做一个比较清晰的介绍呢 S: 谈谈我的理解,不当之处欢迎大家指正:这一系列算法都可以是基于接收数据来对目标数据进行估计,1。LS用于接收到的数据块长度一定,并且数据、噪声(干扰)的统计 ...LS,MMSE,LMMSE,ML,MAP,LMS,AR,MSE误差介绍 - CSDN博客采样器:Stable Diffusion的webUI中,提供了大量的采样器供我们选择,例如Eular a, Heum,DDIM等,不同的采样器之间究竟有什么区别,在操作时又该如何进行选择,本文将会详细讲解采样器是如何工作的,以及各种采Stable Diffusion-采样器篇 - 知乎
最陡下降法、LMS算法、RLS算法及其对比 - CSDN博客
2020年9月4日 文章浏览阅读1w次,点赞6次,收藏33次。最陡下降法、lms算法、rls算法及其对比1、最陡下降算法公式:是真实梯度,梯度公式中含有数学期望,不易求得。lms算法算法公式:其中j(n)是梯度估计。2、最陡下降算法搜索方向为梯度负方向,每一步更新都使目标函数值减小(“最陡下降含义”)lms算法 ...2024年3月18日 文章浏览阅读4.9k次,点赞25次,收藏29次。现在的大模型分为两大类:大语言模型(Large Language Models,简称LLMs)和多模态大模型(Large Multimodal Models,简称LMMs)。本文将从基础定义、输入数据、应用场景、训练过程这几方面讨论下两者的区别。LLMs (Large Language Models, 大型语言模型)- 深度学习的应用 ...多模态大模型(LMMs)与大语言模型(LLMs)的比较2017年6月10日 音质优化,回声消除试听:https://pan.baidu/s/1nvObNvz 时域: LMS滤波器 参数更新公式: 权重更新收到输入信号的能量影响较大 ...各种自适应滤波器总结 - WELEN - 博客园

Kalman Filter与RLS的区别 - CSDN博客
2020年6月8日 文章浏览阅读1.8k次。本文介绍了卡尔曼滤波(kf)与递推最小二乘估计(rls)的区别。kf是一种特殊的最小二乘法,包含预测和更新两个步骤,能在线估计动态系统的状态,而rls仅在接收到新测量值时更新估计,适用于资源有限的环境。kf考虑了系统内部变化,而rls则依赖于测量数据。LS是“最小二乘”,MMSE“最小均方误差”,是两种优化代价函数的准则,二者的理论基础相当,主要区别是前者不使用统计量,后者使用统计量。MAP与ML,前者是Bayesian方法,后者不是,先验概率不能简单的说是有助于简化计算,在先验概率不等的情况下,先验概率会影响判决结果的。AR是最回归过程 ...LS,MMSE,LMMSE,ML,MAP,LMS,AR,MSE误差等算法做一个比较